Рабочий цикл ШИМ-управления H-моста в управлении двигателем
2024/7/20 16:22:47
Вид:25
Какую технологию ШИМ лучше всего использовать для вашего приложения управления двигателем? В предыдущих статьях мы изучали одноквадрантную технологию ШИМ, которая очень подходит для чувствительных к стоимости приложений управления двигателем. В этих приложениях вам нужно контролировать скорость двигателя, изменяя коэффициент заполнения сигнала ШИМ. В любом случае двигатель может вращаться только в одном направлении и генерировать крутящий момент в том же направлении. Мы также представили "H-мост" как ступеньку к исследованию других топологий ШИМ. В этой статье давайте рассмотрим, как использовать H-мост для создания двухнаправленного силового каскада управления скоростью. В частности, мы создадим двухквадрантный драйвер, потому что он может обеспечивать движение вперед с положительным крутящим моментом (1-й квадрант) или обратное движение с отрицательным крутящим моментом (3-й квадрант). Мы снова выберем постоянный двигатель для обсуждения, потому что использование постоянного двигателя позволяет легче понять эти концепции.
Однофазный инвертор с H-мостом
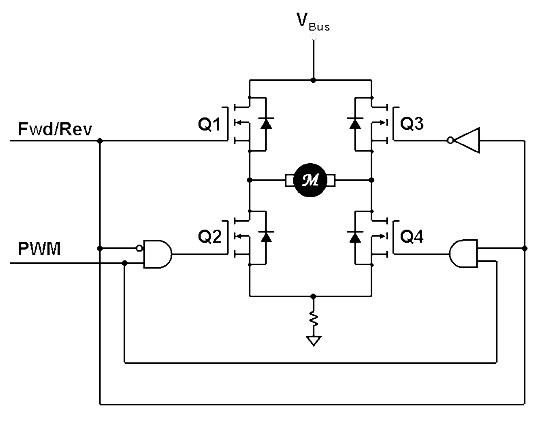
1. Создание униполярного двухквадрантного драйвера с конфигурацией H-моста
Для униполярной работы ШИМ в 1-м квадранте, когда мы применяем ШИМ-сигнал к Q4, Q1 постоянно включен. Вы можете нажать здесь, чтобы посмотреть анимацию униполярной работы ШИМ в 1-м квадранте. Когда Q4 включен, создается путь тока от Vbus, через Q1, через двигатель, через Q4 и обратно на землю. В конце этого состояния ШИМ Q4 выключается. Поскольку обмотка двигателя обладает индуктивностью, она будет пытаться поддерживать ток двигателя в том же направлении. Индуктор защищает свой ток так же, как мать защищает своего ребенка, фактически говоря: "Не трогай мой ток! Если ты это сделаешь, я сгенерирую любое напряжение, необходимое для поддержания потока тока." В результате индуктор заставляет тело диода Q3 проводить. Однако, поскольку Q1 всегда включен, ток двигателя вернется через Q1 вместо источника постоянного тока. Когда вы задумываетесь, вы понимаете, что поскольку Q1 остается включенным, поведение этой схемы точно такое же, как у одноквадрантного драйвера, обсуждавшегося ранее, с одним исключением... Если вы хотите, чтобы двигатель вращался в другом направлении, просто держите Q3 постоянно включенным и применяйте ШИМ к Q2. Это заставит двигатель работать в обратном направлении и генерировать отрицательный крутящий момент, работая в 3-м квадранте. Вы можете нажать здесь, чтобы посмотреть анимацию этого процесса.
Интересно, что в обоих режимах работы в 1-м и 3-м квадрантах, независимо от направления потока тока в двигателе, ток шины либо положителен, либо равен нулю! Другими словами, эта технология ШИМ не может восстанавливать энергию. Это потому, что индуктивный ток возврата "заперт" в верхней половине H-моста и никогда не возвращается в шину постоянного тока. Это может быть либо преимуществом, либо недостатком, в зависимости от вашего приложения. Если вам никогда не нужно беспокоиться о регенеративной энергии, вам не нужно включать стоимость ее обработки в ваш проект. С другой стороны, если вы хотите восстанавливать энергию нагрузки, то эта технология ШИМ не является хорошим выбором для вас.
Еще одно преимущество этой технологии заключается в том, что она требует только одного сигнала ШИМ в любой момент времени. Это означает, что вы можете управлять большим количеством двигателей от одного процессора по сравнению с некоторыми другими топологиями ШИМ. Кроме того, только один транзистор переключается в любой момент времени, минимизируя ваши потери на переключение. Наконец, существует только одно диодное переходное событие за цикл ШИМ (когда тело диода Q3 проводит и Q4 снова включается). Поэтому эта технология не генерирует больше шума при переключении по сравнению с одноквадрантной технологией, обсуждавшейся ранее.
Основным недостатком этой технологии является то, что даже если у вас есть четыре транзистора, вы все равно не можете работать во всех четырех квадрантах. Это как машина без тормозов! Если вы хотите замедлиться, у вас есть два варианта: снять ногу с акселератора и катиться накатом (уменьшить рабочий цикл ШИМ) или внезапно развернуть машину (немедленно перейти из 1-го квадранта в 3-й квадрант!) Кстати, я не рекомендую это пробовать, иначе вы можете оставить свою трансмиссию разбросанной по шоссе! Последняя ситуация называется ЗАТЫКАНИЕ. Хотя это заставит двигатель очень быстро замедлиться, это, как правило, не является хорошей идеей, поскольку возникающий высокий ток может вызвать рассеивание ваших компонентов драйвера по лабораторному столу.
2. Применение технологии ШИМ в управлении двигателями
В некоторых случаях эта технология ШИМ (даже одноквадрантная схема из предыдущей статьи) может вызвать регенерацию энергии обратно в ваш источник постоянного тока. Когда нагрузка вызывает ускорение двигателя в любом направлении, ничто не мешает ему убежать, так как эта технология ШИМ не может обеспечить торможение. Двигатель будет продолжать ускоряться, пока амплитуда его обратного ЭДС не сравняется с напряжением источника постоянного тока. Если скорость превысит эту точку, тела диодов в МОП-транзисторах начнут проводить, позволяя отрицательному току течь в шину постоянного тока. Мы подробно рассмотрим, как решить эту проблему, в будущих статьях.
3. Резюме и перспективы на будущее
В заключение, эта технология ШИМ популярна в приложениях, требующих двухнаправленного управления скоростью двигателя, но не имеет значения, если двигатель катится по инерции, когда вы хотите замедлиться.





